
Lange haben die Entwickler des russischen Unternehmens ROSAlab gefeilt, die Mühe hat sich gelohnt: Das Desktop-System glänzt mit hoher Stabilität und gutem Hardware-Support.
Die russische Softwareschmiede ROSAlab bietet für Unternehmen mit den beiden Linux-Distributionen ROSA X1 Marathon für den Desktop und ROSA Linux Enterprise Server Helium zwei zeitgemäße Betriebssysteme für viele Anwendungsbereiche. Für den ambitionierten Endanwender, der stets neueste Software nutzen möchte, steht seit gut zwei Jahren zusätzlich eine dritte Produktlinie namens ROSA Desktop Fresh bereit.
Obwohl alle drei Distributionen auf Mandriva basieren und ROSAlab obendrein einer der größten Anteilseigner des französischen Unternehmens Mandriva S.A. ist, zeigt das Betriebssystem eine ganze Reihe von Neuerungen, mit denen es sich von der Masse abhebt.
Frisches Outfit
Die Anforderungen an den Rechner für den effizienten Einsatz von ROSA Desktop Fresh geben die Entwickler realistisch an: Mindestens ein Computer mit Pentium-4-CPU und – in der 32-Bit-Variante – 1,5 GByte Arbeitsspeicher sollte bereitstehen; für die 64-Bit-Variante empfehlen die Entwickler 2 GByte RAM. Zudem sollten auf dem Massenspeicher mindestens 20 GByte Platz frei sein.
Die vergleichsweise hohen Anforderungen resultieren aus dem Einsatz von KDE SC, das sich zwar bedienerfreundlich gibt, jedoch hohe Ansprüche in Bezug auf die Ressourcen stellt. ROSA Desktop Fresh gibt es nicht nur mit KDE-Desktop, sondern auch in Varianten mit LXDE, LXQt und Gnome. Diese stellen teils geringere Anforderungen an die Ressourcen und eignen sich daher für schwächere Hardware.
Nach dem Herunterladen des rund 1,8 GByte großen ISO-Images [1] und dem Anlegen eines bootfähigen Datenträgers startet die Software in einen konventionell gestalteten Grub2-Bildschirm, der den Live-Betrieb sowie die direkte Installation des Systems ermöglicht. ROSA Linux startet dabei von der DVD etwas gemächlich in den Live-Modus und überrascht dort mit einem KDE-Desktop, der auf den ersten Blick Gnome 3 zum Verwechseln ähnlich sieht: Auf der Arbeitsfläche tummeln sich Programmstarter und Ordner, die in der Gruppe Willkommen zusammengefasst sind.
Dieser SimpleWelcome genannte Desktop gruppiert dabei die Symbole nach den in konventionellen Menüs vorhandenen Untergruppen. Klicken Sie unten im Bildschirm mittig auf die Schaltfläche Anwendungen, so listet der ROSA-Launcher die im System vorhandenen Applikationen alphabetisch sortiert auf. Am oberen Bildschirmrand findet sich mittig ein Suchfeld. Haben Sie viele Programme installiert, geht die Übersicht am Bildschirm bei dieser Oberfläche sehr schnell verloren. Dann erleichtert die Eingabezeile das schnelle Finden von Programmen.
Rechts neben den Schaltflächen Willkommen und Anwendungen finden Sie noch eine mit der Aufschrift TimeFrame, die die Arbeit mit häufig genutzten Dateien anhand einer Zeitleiste ermöglicht. Dabei greift die Software auf die von Nepomuk generierten Metainformationen zurück und gestattet die Arbeit mit Daten, die im Netz liegen (Abbildung 1).
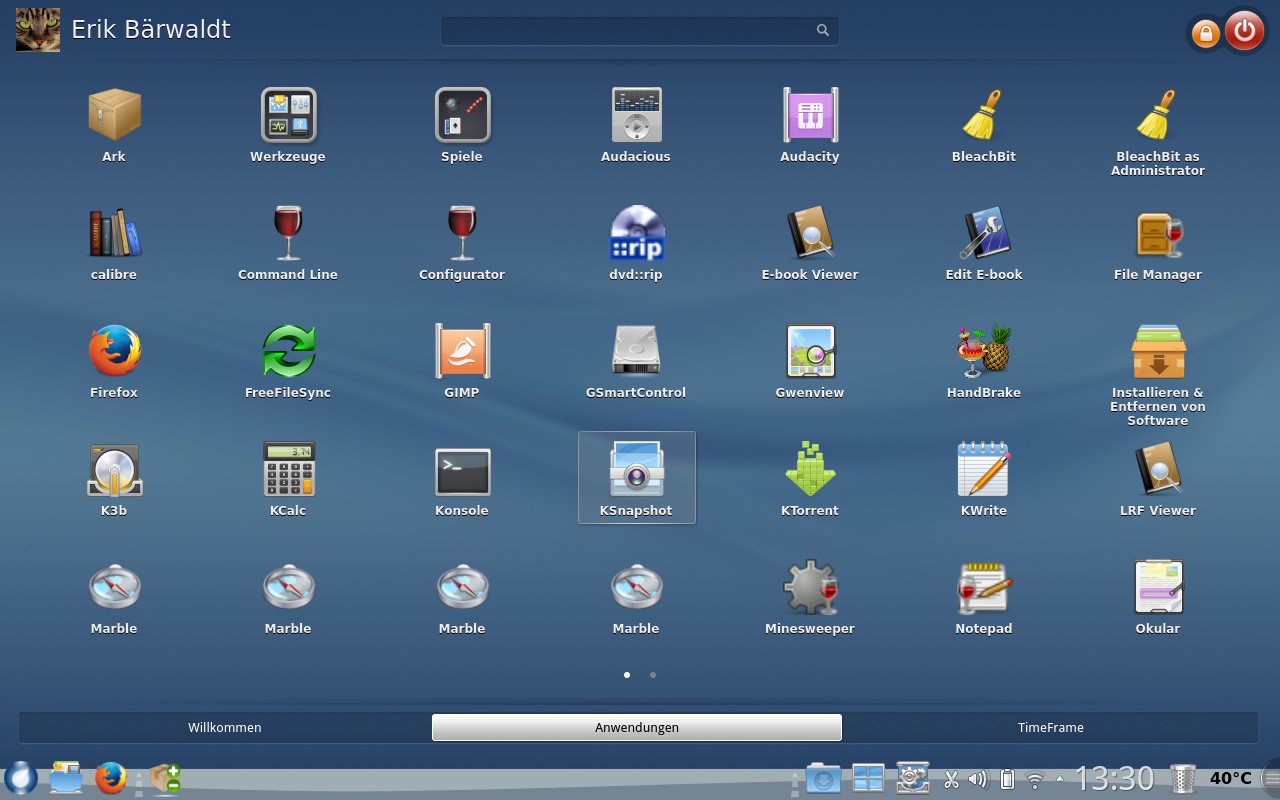
SimpleWelcome.” width=”300″ height=”188″ />
Abbildung 1: Die Standard-Oberfläche von ROSA Fresh nennt sichSimpleWelcome.Das im unteren Bereich des Desktops horizontal angeordnete Panel namens RocketBar wirkt auf den ersten Blick, als stammte es aus KDE. Allerdings öffnet ein Klick auf die Schaltfläche links kein Kickoff-Startmenü, sondern füllt den Bildschirm mit den Startern und Ordnern des ROSA-Launchers. Ein Rechtsklick auf die Schaltfläche fördert zudem eine weitere Eigenheit zutage: Die Option des Standard-Panels von KDE, hier per Mausklick auf die konventionelle Struktur des Menüs umzuschalten, steht selbst nach einer Installation des Systems auf die Festplatte nicht bereit.
Anwender, die mit dem althergebrachten Startmenü arbeiten möchten, kommen daher nicht umhin, in der Softwareverwaltung von ROSA Linux die beiden Pakete rosa-launcher und rosapanel zu deinstallieren und anschließend auf dem Desktop ein neues Panel anzulegen. Das beinhaltet dann das Kickoff-Startmenü und ermöglicht es, auf die klassische Struktur umzuschalten.
StackFolder
ROSAlab setzt auf ein KDE-Applet namens StackFolder. Es dient dazu, den Zugriff auf häufig genutzte Daten zu beschleunigen. Dazu legt die Software einen Stapel von Ordnern an, in dem sich häufig aufgerufene Dateien befinden.
Nach dem Entsperren der Miniprogramme in KDE ziehen Sie solche Ordner aus dem Dateimanager Dolphin heraus auf die Arbeitsfläche und fassen Sie von dort durch Auswahl von Ordnerstapel im Kontextmenü zu einem StackFolder zusammen. Diesen dürfen Sie auf dem Desktop frei positionieren und durch das erneute Sperren der Miniprogramme in KDE am gewünschten Ort fixieren.
Die im Stapel enthaltenen Dateien öffnen Sie nun mit einem einzigen Klick, ohne sich umständlich durch eine mehr oder weniger komplexe Struktur zu arbeiten. Durch verknüpfte Ordner, die Sie im StackFolder ablegen, bauen Sie bei Bedarf hierarchische Strukturen auf. Der Stapel bleibt dabei stets auf dem Desktop sichtbar (Abbildung 2).

Abbildung 2: StackFolder gestatten den schnellen Zugriff auf häufig benötigte Dateien.
Software
Bereits die Live-Variante verfügt neben dem herkömmlichen Bestand an Software über einige Eigenentwicklungen, die in Westeuropa eher unbekannt sein dürften. Dazu zählt neben dem ROSA Media Player auch der ROSA Image Writer, der es gestattet, ISO-Images auf ein bootfähiges USB-Medium zu befördern. Als weiteres exotisches Programm gesellt sich YouMagic dazu, das als russisches Konkurrenzprodukt zu Skype fungiert. Des Weiteren findet sich ein Cloud-Connector, der allerdings erst nach Installation des Pakets rosa-cloud-connector zum Einsatz bereitsteht.
Unter der Haube bietet das Betriebssystem ebenfalls Interessantes: So gibt es mehrere speziell für den Einsatz auf dem Desktop oder einem Server optimierte Kernel-Varianten. Für Notebooks stehen angepasste Kernel über die Softwareverwaltung bereit. Wem die von Haus aus installierte Kernel-Variante 3.14.25 bereits zu betagt erscheint, installiert über ein gesondertes Repository den aktuelleren Kernel 3.17.6 [2].
Da es ROSA Linux mit unterschiedlichen Desktop-Umgebungen gibt, finden sich auch für Gnome und XFCE diverse Erweiterungen und Themes in den Repositories. Zum vergleichsweise aktuellen Softwarebestand zählen neben LibreOffice 4.3.3 auch Firefox 34.0 und Thunderbird 31.0. Die GCC-Compilertools liegen in Version 4.9.2 vor, und der KDE-Desktop notiert bei Variante 4.14.3.
Die Mesa-Grafikbibliothek liegt in Version 10.3.3 bei, auch proprietäre Grafiktreiber von Nvidia und AMD/ATI fehlen nicht. Zudem haben die Entwickler ihr Augenmerk auf Systeme mit Hybridgrafik gelegt: Davon profitieren vor allem hochwertige Notebooks und mobile Workstations, die neben einer internen Intel-Grafikkarte für alltägliche Aufgaben zusätzlich dedizierte Komponenten von Nvidia oder AMD/ATI für rechenintensive grafische Anwendungen eingebaut haben.
Ein besonderes Schmankerl für Anwender mit modernen SSD-Speichern halten die Entwickler ebenfalls bereit: So findet sich mit dem Paket ssd-utils eine Software im System, die den Trim-Befehl auf Solid State Disks ausführt. Das sorgt vor allem bei älteren Modellen, deren interner Controller diesen Befehl zum Löschen noch nicht unterstützt und automatisch anwendet, dafür, dass dieser Speicherzellen bei Bedarf wieder als frei markiert. So bleibt selbst bei sehr intensivem Einsatz einer SSD auf Dauer eine hohe Geschwindigkeit beim Schreiben erhalten. Die SSD-Utilities laufen in der Standardeinstellung einmal wöchentlich.
Auf die Platte
Für die Installation des Betriebssystems führt der Bootloader beim Start des Rechners einen eigenen Menüpunkt auf. Dieser startet ein Setup, das sich weitgehend am Vorbild Mandriva orientiert und daher das System nach nur wenigen Schritten auf den heimischen Massenspeicher packt. Danach steht ROSA Linux in der optisch und technisch gleichen Variante wie im Live-Betrieb bereit.
Viele Distributionen, die auf Mandriva basieren und KDE als Standard-Desktop nutzen, teilen die Konfiguration wie das Original auf zwei Orte auf. Anders ROSA Linux: Hier gibt es das seit weit über zehn Jahren entwickelte und aufgrund seiner ausgezeichneten Konzeption von vielen Distributionen immer noch genutzte Kontrollzentrum nicht mehr. Stattdessen integriert die Distribution viele Dienste aus dem Kontrollzentrum in das KDE-Menü mit den Systemeinstellungen. So findet sich hier unter der alten grafischen Oberfläche von Rpmdrake ein Tool zum Verwalten der Software, die Programme zum Einstellen von Firewall und Kindersicherung sowie ein Tool, über das Sie das Authentifizieren beim Zugriff auf Systemdienste konfigurieren. Auch die Programme für die Hardware-Erkennung sind in das KDE-Menü integriert (Abbildung 3).
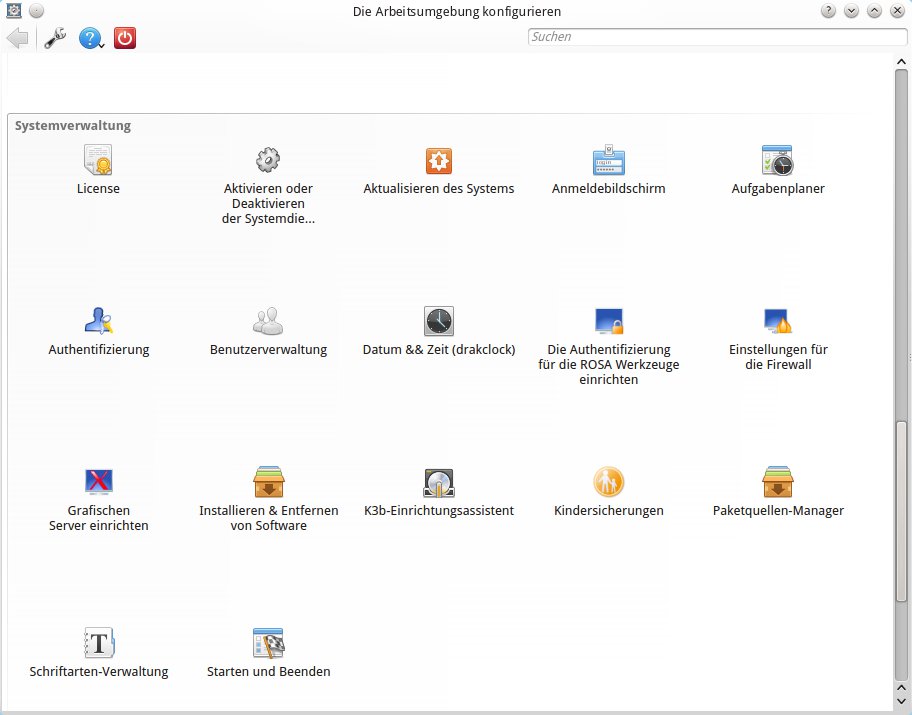
Abbildung 3: ROSA Linux bündelt alle Werkzeuge für die Konfiguration in den KDE-Einstellungen.
Als Paketverwaltung kommt nach wie vor das Mandriva-eigene Urpm zum Einsatz, wobei dank vielfältiger Unterstützung durch Drittanbieter der Bestand in etwa dem von Mageia entspricht.
ROSA Linux bietet bereits in der Grundinstallation im Vergleich zu manchen gängigen Distributionen zusätzliche Annehmlichkeiten: So finden sich unfreie Firmware-Dateien, die bestimmte Hardware zum reibungslosen Einsatz benötigt, bereits fertig integriert; Gleiches gilt für Multimedia-Codecs. Dies hat den Vorteil, dass die manuelle Installation wegfällt.
Qualitätsmanagement
Obwohl ROSAlab die Fresh-Variante seines Betriebssystems eher als experimentell kategorisiert, läuft das System selbst bei widerspenstiger Hardware einwandfrei. Insbesondere auf Notebooks mit schwierigen Komponenten hängt es in Sachen Hardware-Erkennung und Stabilität selbst Boliden wie Debian ab.
Um diese ausgezeichnete Qualität des Betriebssystems zu erreichen, nutzt ROSAlab einen besonderen Prozess zur Qualitätskontrolle: Ein Tool namens Hw-probe bietet Anwendern die Möglichkeit, alle wichtigen Daten eines Systems auszulesen und die Ergebnisse in einer beim Unternehmen geführten Datenbank zu speichern.
Das kleine Kommandozeilenprogramm hw-probe kommt bereits bei der Installation mit auf die Festplatte und sammelt durch Eingabe der folgenden Befehlszeile alle relevanten Daten und Protokolldateien:
$ hw-probe -all -upload -id Computertyp
Diese lädt es in die Datenbank. Sie erhalten anschließend eine eindeutige Nummer mitgeteilt, unter der Sie die Daten des Gerätes in der Datenbank finden. Treten Probleme mit einer spezifischen Konfiguration auf, so bieten diese Daten den Entwicklern die Chance, zu ermitteln, ob es sich hier um eine Hardware-Inkompatibilität oder um einen Software-Fehler handelt.
Aber auch für Endanwender ist die öffentlich einsehbare Datenbank interessant: Beabsichtigen Sie den Neukauf einzelner Hardware-Komponenten oder wollen neue Komplettsysteme anschaffen, so bietet es sich an, vorab in der Datenbank zu recherchieren [3], ob die zum Kauf vorgesehenen Komponenten und Geräte unter ROSA Linux einwandfrei funktionieren (Abbildung 4).
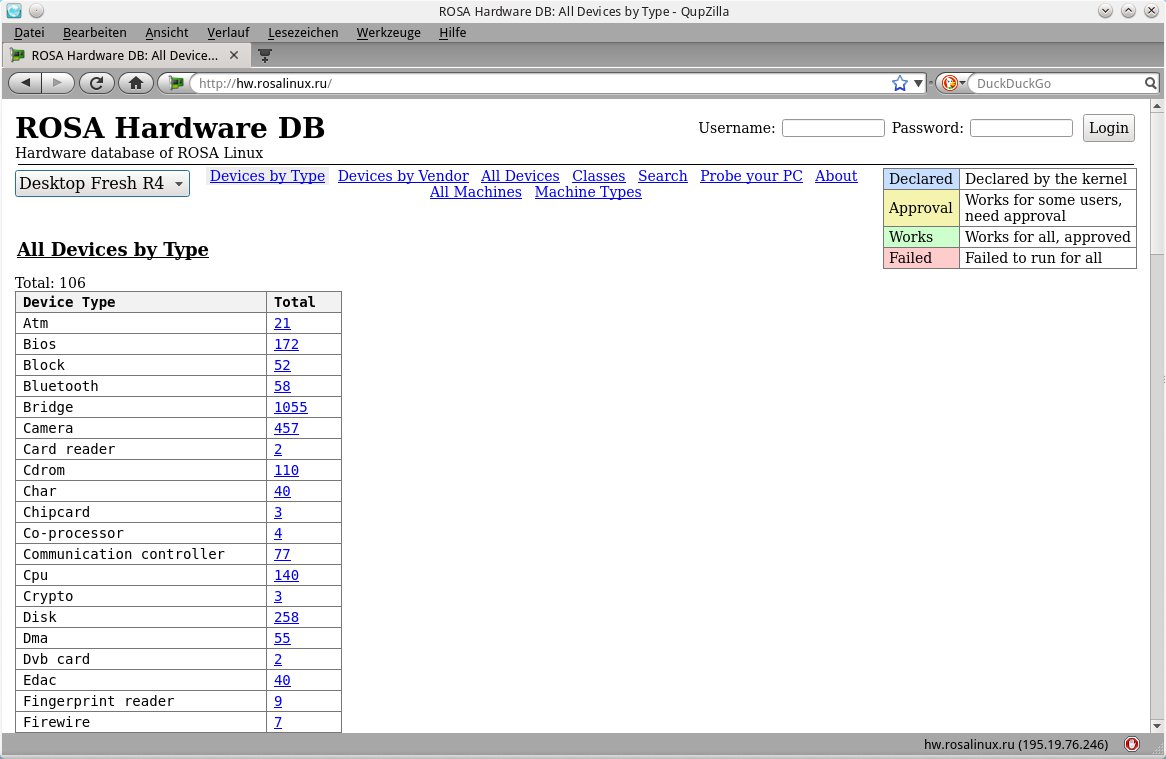
Abbildung 4: Die Hardware-Datenbank gibt Auskunft über unterstützte Geräte und Systeme.
Praxistest
Im mehrere Wochen andauernden Praxistest konnte ROSA Desktop Fresh auf der ganzen Linie überzeugen. Auf allen Systemen fiel eine deutlich verbesserte Stabilität im Vergleich zu den beiden großen Mitbewerbern aus dem Mandriva-Lager, Mageia und PCLinuxOS, auf.
Der gemeinsam mit OpenMandriva entwickelte Kernel, in den verschiedenste Optimierungen für den Einsatz als Desktop-System eingeflossen sind, macht rundum eine gute Figur: Auf Notebooks von Hewlett-Packard und Lenovo fiel zudem neben einer deutlich besseren Unterstützung von ACPI eine längere Akku-Laufzeit auf. Die Kontrolle mithilfe von Powertop [4] förderte weitgehend optimale Systemeinstellungen zutage.
Fazit
Dank eingängiger Konzepte und aktueller Software eignet sich ROSA Desktop Fresh gleichermaßen als Distribution für Einsteiger wie für fortgeschrittene Anwender. Das System hat nahezu alle Kinderkrankheiten überwunden und arbeitet auf neuerer Hardware stabil und schnell.
Verbesserungswürdig erscheint allerdings die Ergonomie des selbst entwickelten Duos SimpleWelcome und RocketBar: Der komplett mit Icons überfrachtete Bildschirm, der sich teils über mehrere Seiten zieht, erweist sich herkömmlichen Menüs als unterlegen. Aber selbst nach dem Umschalten auf ein klassisches Layout bietet das System noch manches optische Schmankerl.
Infos
[1] ROSA Linux herunterladen: http://mirror.rosalab.ru/rosa/rosa2014.1/iso/ROSA.Fresh.R5/
[2] Infos zu den Kernel-Varianten: http://wiki.rosalab.ru/en/index.php/Kernel
[3] Hardware-Datenbank: http://hw.rosalinux.ru
[4] Powertop: Harald Zisler, “Kontrollraum”, LU 01/2013, S. 82, https://www.linux-community.de/27882





Ich verwende die Distro seit einiger Zeit und kann das Fazit dieses Artikels nur unterstreichen.
Bezüglich hw-probe: Der erwähnte Terminus Computertyp ist variabel, hier kann eingetragen werden, was will.
Auch wird nicht, wie beschrieben, eine Nummer mitgeteilt, sondern eine URL, die den Entwicklern mitgeteilt werden kann, um eben beim Bug Tracking zu helfen. :)
Noch ein paar andere nette Tools:
http://wiki.rosalab.com/en/index.php/Blog:ROSA_Planet/Basic_GUI_for_ROSA_Freeze
http://abf-blog.rosalinux.ru/
RLES Helium basiert auf Red Hat 6