Fahren wir in der Zukunft noch Auto – und falls ja, wie? Das Projekt AutoNOMOS der FU Berlin wagt mit seinem Roboter-Auto einen Blick in die Zukunft.
Ein schöner Oktobermorgen in Berlin, am strahlend blauen Himmel schiebt sich nur ab und an ein Wölkchen vor die Sonne. Noch bleibt der Verkehr zwischen Brandenburger Tor und Siegessäule überschaubar, nimmt aber stetig zu. Mit jeder Grünphase strömen mehr Fahrzeuge von Ost nach West und andersherum. Da fahren Kleinwagen, Mittelklasse-Limousinen und ab und an auch mal eine Luxus-Karosse. So sehr sich all die Autos unterscheiden, die an uns vorbei rollen, eines haben sie alle gemeinsam: Am Steuer sitzt ein Mensch und sorgt für – hoffentlich – sichere Fahrt.
Wir stehen auf der Straße des 17. Juni und warten. Nach ein paar Minuten wendet ein entgegen kommender Kombi rasant und bleibt kurz vor uns auf dem Parkstreifen stehen. Auf den ersten Blick sieht der Wagen aus, wie Kombis nun einmal aussehen – doch halt, irgend etwas ist anders: Auf einem Gestell auf dem Dach des Autos rotiert ein Zylinder, etwas größer als eine Getränkedose. An verschiedenen Stellen der Karosserie finden sich seltsame schwarze Kästchen montiert, zudem sitzt am Hinterrad ein Gestell, wie man es sonst nur von Autos beim Crash-Test kennt.
Geisterauto
Der geheimnisvolle Kombi parkt ein, allein. Der Fahrer, Tinosch Ganjineh, winkt uns währenddessen fröhlich aus dem Fenster zu (Abbildung 1). Er sitzt im MadeInGermany, dem wohl ersten Auto in Berlin, das alleine fahren kann: Das autonome Fahrzeug, sozusagen ein Roboter, fährt von selbst, lenkt alleine, erkennt Ampeln und Hindernisse und entscheidet (in Maßen) eigenständig.
Der MadeInGermany ist bereits das zweite Auto seiner Art und wurde im Rahmen des AutoNOMOS-Projekts [1] an der freien Universität Berlin entwickelt. Dessen technischer Leiter, der freundlich winkende Informatiker Tinosch Ganjineh, hat uns zu einer Probefahrt im autonomen Pkw eingeladen. Wir steigen in den Fond, und schon geht es los.

Abbildung 1: Darf ich Sie mitnehmen? Tinosch Ganjineh von den AutoNOMOS Labs lädt uns zur Testfahrt ein.
Tinosch Ganjineh sitzt zwar hinter dem Steuer, doch weder seine Hände noch seine Füße berühren die Steuerelemente: Er fährt nur als sogenannter Sicherheitsfahrer mit: Im Notfall könnte er während der Fahrt jederzeit eingreifen und die Computersteuerung “überstimmen”. Rechts neben ihm sitzt Miao Wang, ein Notebook auf dem Schoß. Der Informatiker überwacht die Rechnertechnik und Sensorik. Der Computer auf Wangs Schoß meldet kurz, dass alle Systeme bereit sind.
Dann blinkt der Kombi, rollt an und nutzt die nächste größere Lücke, um sich in den Verkehrsstrom einzufädeln – alles wie von selbst. Es fühlt sich im ersten Moment ein wenig komisch an, das Auto selbst lenken und beschleunigen zu sehen und zu fühlen. Nur wenige Sekunden später jedoch lehnen wir uns schon entspannt zurück und genießen die Fahrt, die sich nun nicht mehr viel anders anfühlt, als eine Tour in einem Taxi. Der MadeInGermany beschleunigt und bremst fast ebenso sanft, aber bestimmt, wie es auch ein guter Taxifahrer machen würde.
Wir schwimmen im Verkehr mit, die erste Ampel zeigt grün. Ein Blick über Wangs Schulter zeigt, dass der Computer das schon lange erfasst hat. In einem Videofenster sehen wir die Straße vor uns und die Ampel. Ein Kästchen um das grüne Licht signalisiert, dass der Computer weiß, dass wir weiterfahren dürfen. Die nächste Ampel allerdings schaltet auf Rot. Bei Wang: Das gleiches Bild, nur diesmal sitzt das Kästchen um das rote Licht. Der Computer spricht’s, der MadeInGermany stoppt. Als die Ampel auf Grün springt, vermeldet der Rechner den Vorgang sofort, das Auto fährt weiter.
Technik-Trick
Wir nutzen die Zeit, um über das Roboterfahrzeug zu sprechen. Tinosch Ganjineh erklärt uns die Technik: “Wir erfassen mit Hilfe von zwei Farbkameras die Ampeln. Über den Farbwert kann dann der Schaltzustand ermittelt werden und das Fahrzeug reagiert dann entsprechend.” Hinzu kommt eine ganz Palette an Sensoren, Laser-Scannern und ein Kofferraum voll Rechentechnik.
In der Front- und der Heckschürze des MadeInGermany sind je drei kleine Laser-Scanner verbaut, mit denen das Fahrzeug Objekte in Rundumsicht auf über 100 Meter Abstand erkennt. Bei dem eingangs als “rotierende Getränkedose” beschriebenen Zylinder auf dem Dach (Abbildung 2) handelt es sich in Wahrheit um einen rotierenden Laserscanner, der 64 Laserstrahlen in die Umgebung wirft. Mit ihm auf und den anderen sechs Scannern stehen dem Fahrzeugrechner insgesamt zwei unabhängige Systeme für das Erkennen von Autos und Passanten zu Verfügung.

Abbildung 2: Der hochpräzise Laser-Scanner auf dem Dach erkennt Objekte in bis zu 70 Meter Entfernung (in Abhängigkeit von der Reflektivität sogar bis zu 90 Meter).
Um überhaupt zu wissen, wo es ist, nutzt das Auto einen Empfänger für das Global Positioning System (GPS). Fallen die Satellitensignale einmal aus, etwa wenn der Wagen in einen Tunnel fährt, springt eine sogenannte Inertialeinheit ein und ermittelt anhand der Daten von Beschleunigungssensoren sowie eines elektronischen Gyroskops die Position des Fahrzeugs. Durch zusätzliche Korrektursignale errechnet die GPS-Einheit die Position des Fahrzeugs mit einem Fehler weit unter einem Meter: Anders als bei einem handelsüblichen Navi muss der Rechner des MadeInGermany für die Spurführung im Zentimeter-Bereich agieren.
Tux lenkt
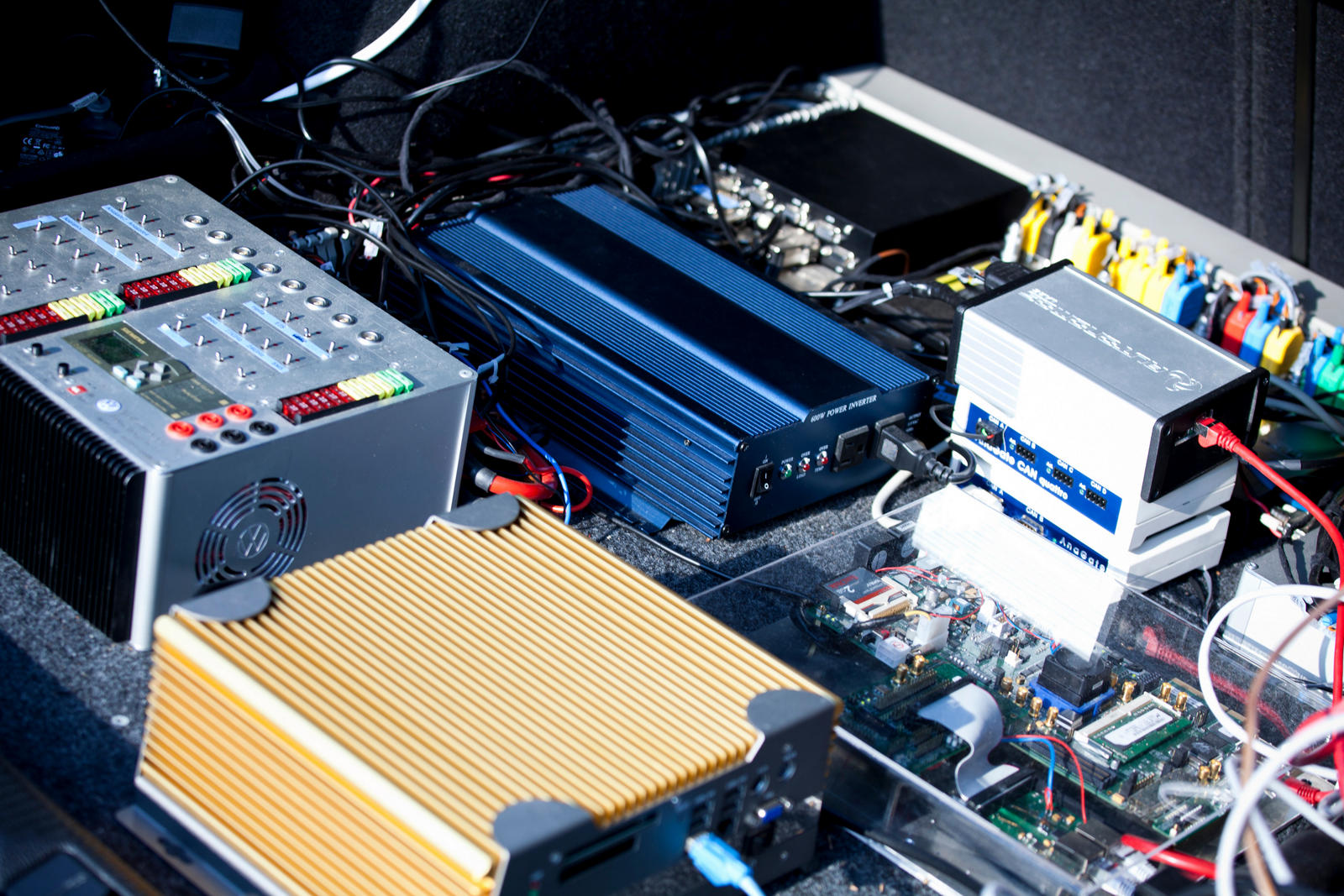
Die Ergebnisse der Sensoren landen im Kofferraum des Kombis auf einem nahezu handelsüblichen x86-PC, auf dem Linux läuft (Abbildung 3). Was das System berechnet hat, geht dann in Form von Steuersignalen via CAN-Bus [2] an die verschiedenen Komponenten des Autos.
MadeInGermany erledigt ein Linux-System im Kofferraum.” width=”300″ height=”200″ />
Abbildung 3: Tux an Bord – die gesamten Berechnungen zur Steuerung desMadeInGermany erledigt ein Linux-System im Kofferraum.Im MadeInGermany dient der CAN-Bus dazu, Bremsen, Gaspedal und (über einen zusätzlichen elektrischen Motor an der Lenksäule) die Lenkung zu steuern. Auf diese Weise kann das System beschleunigen, bremsen sowie um Kurven lenken und hat daneben auch Zugriff auf Funktionen wie Blinker und Hupe. Das Verfahren nennt sich Drive-by-wire.
Ein heftiger Ruck schreckt uns aus dem Gespräch: Soeben hat uns ein freundlicher Berliner geschnitten. Der MadeInGermany hat prompt reagiert und eine etwas heftigere Bremsung vollführt – übrigens die einzige dieser Art auf unserer Testfahrt.
Tinosch Ganjineh erzählt, während eines anderen Tests sei neben einem Kamera-Team auch “Freund Murphy” an Bord gewesen. Und wie es nach dessen Gesetzt kommen musste, patzte der MadeInGermany an einer Ampel, sodass der Informatiker als Sicherheitsfahrer einmal kräftig die Bremse treten musste. So etwas sei ärgerlich, aber bei einem Versuchsfahrzeug müsse man das ab und an schlicht hinnehmen. Im konkreten Fall hatte die Sonne die Ampel in einem so ungünstigen Winkel beschienen, dass die Kameras die Farbe nur noch extrem schlecht wahrnehmen konnten.
Nach gut zwanzig Minuten autonomer Fahrt sind wir zurück am Brandenburger Tor. Die Fahrt war auf angenehme Art spektakulär unspektakulär. Hätte nicht ein deutlich sichtbares Schild “Erprobungsfahrt” am Kofferraum geklebt (Abbildung 4), der Kombi wäre zwischen all den anderen Autos kaum noch aufgefallen – nun ja, bis auf seine Laser-Scanner und Sensoren.

Abbildung 4: Trotz des deutlich sichtbaren Hinweises auf dem Kofferraum halten viele Autofahrer keinen Abstand zum Versuchsfahrzeug.
Ausblick
Unsere Fahrt in einem der ersten straßenzugelassenen autonomen Autos ist vorüber. Sie gibt einen Vorgeschmack auf das, was schon in zwanzig Jahren völlige Normalität auf unseren Straßen sein könnte [3]. Schon heute helfen ähnliche Systeme beim Fahren und greifen auch immer häufiger sanft ins Geschehen ein. Und selbst gelenkte Autos? Was wird aus denen?
Diese Frage weiß uns Professor Raúl Rojas, Leiter der Arbeitsgruppe Künstliche Intelligenz an der FU Berlin, zu beantworten. Er sagt: “Wer noch selbst Auto fahren will – was übrigens viel unsicherer sein wird, als den Computer steuern zu lassen – wird das am Wochenende in einem Park tun.” Selbst steuern als Freizeitspaß – schöne neue Auto-Welt.
Die Geschichte des AutoNOMOS-Projekts
Begonnen hatte es mit AutoNOMOS beim Fußball in der Roboterliga: Ein Team der Freien Universität Berlin nahm mehrfach am Robocup [4] teil und wurde schließlich Weltmeister. Die Teammitgliedern freuten sich, verloren aber gleichzeitig ein wenig den Ansporn. Da kam es gerade recht, dass in Amerika die Darpa Grand Challenge [5] ausgerufen worden war: Ein Wettrennen für autonome Fahrzeuge. Start war im November 2007.
Die Berliner wollten dabei sein, hatten aber zwei Probleme: Erstens die Zeit, zweitens das Budget. Nur 100?000 Euro mussten reichen, um ein Auto zu kaufen und es technisch umzurüsten, wofür nur wenige Monate verblieben. Das passende Fahrzeug – den künftigen Spirit of Berlin (Abbildung 5) – fanden die Informatiker in Kanada, kauften es über ein Online-Auktionshaus und verschifften es dann mit Umweg via USA über den Atlantik nach Deutschland. Erst Anfang 2007 ging dann die eigentliche Entwicklungsarbeit los.

Spirit of Berlin nahmen die Forscher der FU Berlin an der Darpa Grand Challenge teil.” width=”300″ height=”225″ />
Abbildung 5: Der Urahn – mit demSpirit of Berlin nahmen die Forscher der FU Berlin an der Darpa Grand Challenge teil.Aber es klappte: Das Team Berlin meisterte die Vorausscheidungen und kam ins Halbfinale der Darpa Grand Challenge, also unter die dreißig besten Teams. Hier mussten sie sich mit Größen wie der Stanford University oder dem MIT (Massachusetts Institute of Technology) messen. Sie gewannen zwar nicht, demonstrierten jedoch eindrucksvoll, dass es auch mit wenig Zeit und noch weniger Geld möglich ist, ein autonomes Auto zu entwickeln. In der Folge wurde der Spirit of Berlin stetig weiterentwickelt. So spendierten die Forscher dem Wagen unter anderem eine Augensteuerung ([6],[7]), als Gag am Rande konnte man das Fahrzeug auch per Smartphone und Tablet dirigieren.
Die nächste Stufe stellte ab 2010 der MadeInGermany dar. Das Auto, das sich nun direkt elektronisch ansprechen und steuern ließ, erhielt eine Gedankensteuerung [8]. Als Nächstes brachten die Forscher ihm bei, auf Zuruf ganz allein eine vorprogrammierte Route abseits des Straßenverkehrs zu fahren. Das autonome Fahren mit Straßenzulassung stellt den aktuellen Höhepunkt der Entwicklung dar. Noch in diesem Jahr wollen die Berliner (Abbildung 6) ihr drittes autonomes Fahrzeug der Öffentlichkeit vorstellen, ein Elektroauto.

Abbildung 6: Das Autonomos-Team schraubt bereit an ihrem dritten Roboter-Auto: Diesmal wird es ein Elektrofahrzeug.
Autonomos ist allerdings nicht das einzige Projekt, das sich mit der Entwicklung autonomer Fahrzeuge beschäftigt: In Deutschland gibt es zweites Team in Braunschweig, das ebenfalls bereits eine Straßenzulassung für sein Fahrzeug [9] hat. Über die derzeit wohl größte Flotte autonomer Wagen allerdings verfügt derzeit der Suchmaschinenbetreiber Google in seinem Entwicklungsteam [10].
Bilder
| Abb. | Bildnachweis |
|---|---|
| 1, 5, 6 | AutoNOMOS Labs, http://www.autonomos-labs.de |
| 2, 3, 4 | Claudia Heinstein, http://blitzsaloon.de |
Glossar
-
CAN-Bus
-
Controller Area Network (ISO 11898). Ein asynchrones, serielles Feldbus-System für die Vernetzung von Steuergeräten in Automobilen. Es existieren eine Lowspeed- (125 kbit/s) und eine Highspeed-Variante (1 Mbits/s).
Infos
[1] AutoNOMOS-Projekt: http://www.autonomos.inf.fu-berlin.de
[2] CAN-Bus: http://de.wikipedia.org/wiki/CAN-Bus
[3] DLF – “Auf dem Weg zur neuen Mobilität”: http://www.dradio.de/dlf/sendungen/forschak/1296107/
[4] Robocup: http://www.robocup.org
[5] Darpa Grand Challenge: http://de.wikipedia.org/wiki/DARPA_Grand_Challenge
[6] EyeDriver (YouTube): http://tinyurl.com/lu1211-eyedriver
[7] WDR 5 – “Lenken mit den Augen”: http://www.radiofuzzie.com/proben-rundfunk.html#Leonardo_AutoNOMOS
[8] BrainDriver (YouTube): http://tinyurl.com/lu1211-braindriver
[9] “Leonie”: http://tinyurl.com/lu1211-leonie
[10] Google Self Driving Car: http://tinyurl.com/lu1211-googlecar